Note
This notebook can be downloaded here: 02_RL_1_CartPole.ipynb
Practical Work: Reinforcement Learning¶
Part 1: Solving the CartPole environment¶
I - CartPole¶
Description¶
A pole is attached by an un-actuated joint to a cart, which moves along a frictionless track. The pendulum starts upright, and the goal is to prevent it from falling over by increasing and reducing the cart’s velocity.
This environment corresponds to the version of the cart-pole problem described by Barto, Sutton, and Anderson
Environment Observation¶
| Num | Observation | Min | Max |
|---|---|---|---|
| 0 | Cart Position | -2.4 | 2.4 |
| 1 | Cart Velocity | -Inf | Inf |
| 2 | Pole Angle | ~ -41.8° | ~ 41.8° |
| 3 | Pole Velocity At Tip | -Inf | Inf |
Environment Actions¶
| Num | Action |
|---|---|
| 0 | Push cart to the left |
| 1 | Push cart to the right |
Reward¶
Reward is 1 for every step taken, including the termination step
Starting State¶
All observations are assigned a uniform random value between ±0.05
Episode Termination¶
- Pole Angle is more than ±12°
- Cart Position is more than ±2.4 (center of the cart reaches the edge of the display)
- Episode length is greater than 200
Solved Requirements¶
Considered solved when the average reward is greater than or equal to 195.0 over 100 consecutive trials.
1- Try to play by yourself!¶
import gym
from gym.envs.classic_control.cartpole import *
from pyglet.window import key
import matplotlib.pyplot as plt
import time
bool_do_not_quit = True # Boolean to quit pyglet
scores = [] # Your gaming score
a = 0 # Action
def key_press(k, mod):
global bool_do_not_quit, a, restart
if k==0xff0d: restart = True
if k==key.ESCAPE: bool_do_not_quit=False # Added to Quit
if k==key.Q: bool_do_not_quit=False # Added to Quit
if k==key.LEFT: a = 0 # 0 Push cart to the left
if k==key.RIGHT: a = 1 # 1 Push cart to the right
def run_cartPole_asHuman(policy=None, record_video=False):
env = CartPoleEnv()
env.reset()
env.render()
if record_video:
env.monitor.start('/tmp/video-test', force=True)
env.viewer.window.on_key_press = key_press
while bool_do_not_quit:
env.reset()
total_reward = 0.0
steps = 0
restart = False
t1 = time.time() # Trial timer
while bool_do_not_quit:
s, r, done, info = env.step(a)
time.sleep(1/10) # 10fps: Super slow for us poor little human!
total_reward += r
steps += 1
if not record_video: # Faster, but you can as well call env.render() every time to play full window.
env.render()
if done or restart:
t1 = time.time()-t1
scores.append(total_reward)
print("Trial", len(scores), "| Score:", total_reward, '|', steps, "steps | %0.2fs."% t1)
break
env.close()
run_cartPole_asHuman() # Run with human keyboard input
Trial 1 | Score: 9.0 | 9 steps | 0.96s.
Trial 2 | Score: 11.0 | 11 steps | 1.14s.
Trial 3 | Score: 11.0 | 11 steps | 1.13s.
Trial 4 | Score: 10.0 | 10 steps | 1.04s.
Trial 5 | Score: 9.0 | 9 steps | 0.93s.
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
# Plot your score
fig = plt.figure()
ax = fig.add_subplot(111)
plt.plot(np.arange(1, len(scores)+1), scores)
plt.title('My human performance on CartPole-v0')
plt.ylabel('Score')
plt.xlabel('Human Episode')
plt.show()

2 - Create an Agent to solve the problem¶
- Hand-crafted conditionnal control
- Always 0 or Always 1
- Random action
- Conditional Statements (If/Else Bang) control on an observed value
- Control theory:
- PID controller
- Model Predictive controler
- Reinforcement Learning
- Random Search
- Policy Gradient
- Q-Learning
- Deep Q-Learning
- More: What you want!
import gym
import numpy as np
# Define the Environments
env = gym.make('CartPole-v0')
# We can customize the environments:
# env.env.theta_threshold_radians = np.pi * 2
# env.env.x_threshold = 5
# env.env.force_mag = 100
# env.env.state[2] = np.pi # Initial angle state to put after env.reset()
# Set random generator for reproductible runs
env.seed(0)
np.random.seed(0)
# Number of Dimensions in the Observable Space and number of Control Actions in the Environments
print('Observation Space:', env.observation_space)
print('Action Space:', env.action_space)
print("\n")
print("Observation Space Param: Cart Position|Cart Velocity | Pole Angle | Pole Velocity |", )
print("Observation Space Highs: ", env.observation_space.high)
print("Observation Space Lows: ", env.observation_space.low)
Observation Space: Box(4,)
Action Space: Discrete(2)
Observation Space Param: Cart Position|Cart Velocity | Pole Angle | Pole Velocity |
Observation Space Highs: [4.8000002e+00 3.4028235e+38 4.1887903e-01 3.4028235e+38]
Observation Space Lows: [-4.8000002e+00 -3.4028235e+38 -4.1887903e-01 -3.4028235e+38]
# Run the environment
from collections import deque
import numpy as np
from gym.envs.classic_control.cartpole import *
from pyglet.window import key
import time
bool_quit = False
def key_press(k, mod):
global bool_quit, action, restart
if k==0xff0d: restart = True
if k==key.ESCAPE: bool_quit=True # Quit properly
if k==key.Q: bool_quit=True # Quit properly
if k==key.LEFT: action = 0 # 0 Push cart to the left
if k==key.RIGHT: action = 1 # 1 Push cart to the right
def run_cartPole(policy, n_episodes=1000, max_t=1000, print_every=100, render_env=True, record_video=False):
"""Run the CartPole-v0 environment.
Params
======
n_episodes (int): maximum number of training episodes
max_t (int): maximum number of timesteps per episode
print_every (int): how often to print average score (over last 100 episodes)
Adapted from:
https://github.com/udacity/deep-reinforcement-learning/blob/master/hill-climbing/Hill_Climbing.ipynb
"""
global bool_quit
if policy.__class__.__name__ == 'Policy_Human':
global action
action = 0 # Global variable used for manual control with key_press
env = CartPoleEnv() # This is mandatory for keyboard input
env.reset() # This is mandatory for keyboard input
env.render() # This is mandatory for keyboard input
env.viewer.window.on_key_press = key_press # Quit properly & human keyboard inputs
else:
print('** Evaluating', policy.__class__.__name__, '**')
# Define the Environments
env = gym.make('CartPole-v0')
# Set random generator for reproductible runs
env.seed(0)
np.random.seed(0)
if record_video:
env.monitor.start('/tmp/video-test', force=True)
scores_deque = deque(maxlen=100)
scores = []
trials_to_solve=[]
for i_episode in range(1, n_episodes+1):
rewards = []
state = env.reset()
if 'reset' in dir(policy): # Check if the .reset method exists
policy.reset(state)
for t in range(max_t): # Avoid stucked episodes
action = policy.act(state)
state, reward, done, info = env.step(action)
rewards.append(reward)
if 'memorize' in dir(policy): # Check if the .memorize method exists
policy.memorize(state, action, reward, done)
if render_env: # Faster, but you can as well call env.render() every time to play full window.
env.render() # (mode='rgb_array') # Added # Changed mode
if done: # if Pole Angle is more than +-12 deg or Cart Position is more than +-2.4 (center of the cart reaches the edge of the display) the simulation ends
trials_to_solve.append(t)
break
scores_deque.append(sum(rewards))
scores.append(sum(rewards))
if 'update' in dir(policy): # Check if the .update method exists
policy.update(state) # Update the policy
if i_episode % print_every == 0:
print('Episode {}\tAverage Score: {:.2f}\tSteps: {:d}'.format(i_episode, np.mean(scores_deque), t))
if np.mean(scores_deque) >= 195.0:
print('Episode {}\tAverage Score: {:.2f}\tSteps: {:d}'.format(i_episode, np.mean(scores_deque), t))
print('** Environment solved in {:d} episodes!\tAverage Score: {:.2f}'.format(max(1, i_episode-100), np.mean(scores_deque)))
break
if bool_quit:
break
if np.mean(scores_deque) < 195.0:
print('** The environment has never been solved!')
print(' Mean scores on all runs was < 195.0')
if record_video:
env.env.close()
env.close()
return scores, trials_to_solve
# Performance plots
import matplotlib.pyplot as plt
%matplotlib inline
def plot_performance(scores):
# Plot the policy performance
fig = plt.figure()
ax = fig.add_subplot(111)
x = np.arange(1, len(scores) + 1)
y = scores
plt.scatter(x, y, marker='x', c=y)
fit = np.polyfit(x, y, deg=4)
p = np.poly1d(fit)
plt.plot(x,p(x),"r--")
plt.ylabel('Score')
plt.xlabel('Episode #')
plt.title(policy.__class__.__name__ + ' performance on CartPole-v0')
plt.show()
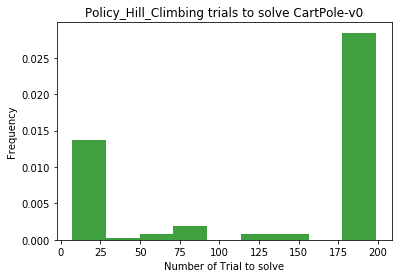
def plot_trials_to_solve(trials_to_solve):
# Plot the policy number of trials to solve the Environment
fig = plt.figure()
ax = fig.add_subplot(111)
plt.hist(trials_to_solve, bins='auto', density=True, facecolor='g', alpha=0.75)
plt.ylabel('Frequency')
plt.xlabel('Number of Trial to solve')
plt.title(policy.__class__.__name__ + ' trials to solve CartPole-v0')
plt.show()
def plot_weights_history(weights_history):
weights_history = np.array(weights_history)
# weights_history[:, 0, 0] # Cart Pos, Action 0
# weights_history[:, 1, 0] # Cart Vel, Action 0
# weights_history[:, 2, 0] # Pole Ang, Action 0
# weights_history[:, 3, 0] # Pole Vel, Action 0
plt.figure(0)
plt.subplots_adjust(bottom=0, left=.01, right=.99, top=1.6, hspace=.5)
i = 0
for obs_id in range(weights_history.shape[1]): # Loop through Observations
if len(weights_history.shape) == 3:
for act_id in range(weights_history.shape[2]): # Action 0 and Action 1
plt.subplot(4, 2, i + 1)
i += 1
# plt.axis('off')
plt.plot(weights_history[:, obs_id, act_id])
plt.title('Obs%d, Act%d' % (obs_id, act_id))
else:
plt.subplot(2, 2, i + 1)
i += 1
# plt.axis('off')
plt.plot(weights_history[:, obs_id])
plt.title('Obs%d' % (obs_id))
2.1 - Human keyboard input Policy¶
# Define a human keyboard input Policy
import time
class Policy_Human():
def act(self, state):
global action # action is a global variable changed by keyboard input
time.sleep(1/10) # 10fps: Super slow for us poor little human!
return action
policy = Policy_Human()
scores, trials_to_solve = run_cartPole(policy, n_episodes=100, print_every=100, record_video=False)
print('** Mean average score:', np.mean(scores))
plot_performance(scores)


2.2 Always the same Policy¶
# Define a binary Policy
class Policy_Always0():
def act(self, state):
print('** Add your code here **')
return action
policy = Policy_Always0()
scores, trials_to_solve = run_cartPole(policy, n_episodes=1000, print_every=100, record_video=False)
print('** Mean average score:', np.mean(scores))
plot_performance(scores)
plot_trials_to_solve(trials_to_solve)
** Evaluating Policy_Always0 **
Episode 100 Average Score: 9.40 Steps: 8
Episode 200 Average Score: 9.24 Steps: 8
Episode 300 Average Score: 9.41 Steps: 8
Episode 400 Average Score: 9.27 Steps: 9
Episode 500 Average Score: 9.34 Steps: 9
Episode 600 Average Score: 9.38 Steps: 9
Episode 700 Average Score: 9.37 Steps: 9
Episode 800 Average Score: 9.31 Steps: 8
Episode 900 Average Score: 9.33 Steps: 8
Episode 1000 Average Score: 9.34 Steps: 8
** The environment has never been solved!
Mean scores on all runs was < 195.0
** Mean average score: 9.339


2.3 Random Policy¶
# Define a random Policy
class Policy_Random():
def act(self, state):
self.observation = state
print('** Add your code here **')
return action
policy = Policy_Random()
scores, trials_to_solve = run_cartPole(policy, n_episodes=1000, print_every=100, record_video=False)
print('** Mean average score:', np.mean(scores))
plot_performance(scores)
plot_trials_to_solve(trials_to_solve)
** Evaluating Policy_Random **
Episode 100 Average Score: 9.31 Steps: 9
Episode 200 Average Score: 9.47 Steps: 9
Episode 300 Average Score: 9.27 Steps: 9
Episode 400 Average Score: 9.46 Steps: 8
Episode 500 Average Score: 9.38 Steps: 8
Episode 600 Average Score: 9.37 Steps: 8
Episode 700 Average Score: 9.41 Steps: 8
Episode 800 Average Score: 9.37 Steps: 9
Episode 900 Average Score: 9.35 Steps: 9
Episode 1000 Average Score: 9.35 Steps: 9
** The environment has never been solved!
Mean scores on all runs was < 195.0
** Mean average score: 9.374


2.4 Conditional statement control Policy¶
# Define a conditional statment control Policy on the Angle
class Policy_ConditionalBangControl():
def __init__(self):
self.action = 0
def act(self, state):
self.observation_angle = state[2] # This is the observed pole angle
print('** Add your IF/ELSE code here **)
return self.action
policy = Policy_ConditionalBangControl()
scores, trials_to_solve = run_cartPole(policy, n_episodes=1000, print_every=100, record_video=False)
plot_performance(scores)
plot_trials_to_solve(trials_to_solve)
** Evaluating Policy_ConditionalBangControl **
Episode 100 Average Score: 41.43 Steps: 46
Episode 200 Average Score: 42.01 Steps: 29
Episode 300 Average Score: 42.02 Steps: 57
Episode 400 Average Score: 41.94 Steps: 33
Episode 500 Average Score: 41.99 Steps: 37
Episode 600 Average Score: 42.34 Steps: 45
Episode 700 Average Score: 41.56 Steps: 46
Episode 800 Average Score: 42.27 Steps: 45
Episode 900 Average Score: 40.70 Steps: 37
Episode 1000 Average Score: 42.20 Steps: 36
** The environment has never been solved!
Mean scores on all runs was < 195.0


class Policy_AdvancedConditionalBangControl():
def __init__(self):
self.action = 0
def act(self, state):
self.observation_angle = state[2] # This is the observed pole angle
self.observation_pole_vel = state[3] # This is the observed pole velocity
print('** Add your hacky solution here **')
return action
policy = Policy_AdvancedConditionalBangControl()
scores, trials_to_solve = run_cartPole(policy, n_episodes=1000, print_every=100, record_video=False)
** Evaluating Policy_AdvancedConditionalBangControl **
Episode 1 Average Score: 200.00 Steps: 199
** Environment solved in -99 episodes! Average Score: 200.00
2.5 PID controler Policy¶
# TODO: Machine Learning to find the PID controller coefficients
# Original code from http://www.inf.u-szeged.hu/~szepet/python/pend_continuous.py
from simple_pid import PID
# Define an PID control Policy
class Policy_PID():
def __init__(self):
self.action = 0
self.log_err = [] # Log the error signal
self.abs_force_sum = 0
self.pars = [-1000, -1, 0.1] # TODO: How could we learn those parameters? [0.3, 0.01, 0.1]
self.setpoint = 0;
self.pid = PID(
self.pars[0], self.pars[1], self.pars[2], self.setpoint)
self.pid.output_limits = (-1, 1) # Limit output to the range of action space
# New output will only be calculated when sample_time seconds has passed
self.pid.sample_time = 0.00001 # WARNING: This is not depended to the env.state! Only CPU time..
def act(self, state):
self.cartpos = state[0] # position of the cart
self.observation_angle_rad = state[2] * (180 / np.pi) # angle of the pole
# Error calculation
err = self.setpoint - self.observation_angle_rad
self.log_err.append(err) # log the error for visualization
force_k = self.pid(err);
self.abs_force_sum += np.absolute(force_k)
if force_k > 0:
return 1
else:
return 0
policy = Policy_PID()
scores, trials_to_solve = run_cartPole(policy, n_episodes=1000, print_every=100, record_video=False)
print('** Mean average score:', np.mean(scores))
plot_performance(scores)
plot_trials_to_solve(trials_to_solve)
abs_error_sum = np.sum(np.absolute(policy.log_err))
print('Absolute PID controller Error sum:', abs_error_sum)
print('Absolute PID controller Force sum:', policy.abs_force_sum)
plt.plot(policy.log_err)
plt.show()
** Evaluating Policy_PID **
Episode 100 Average Score: 9.27 Steps: 8
Episode 200 Average Score: 9.34 Steps: 8
Episode 300 Average Score: 9.21 Steps: 10
Episode 400 Average Score: 9.30 Steps: 8
Episode 500 Average Score: 9.24 Steps: 8
Episode 600 Average Score: 9.44 Steps: 10
Episode 700 Average Score: 9.57 Steps: 8
Episode 800 Average Score: 9.53 Steps: 10
Episode 900 Average Score: 9.39 Steps: 10
Episode 1000 Average Score: 9.64 Steps: 8
** The environment has never been solved!
Mean scores on all runs was < 195.0
** Mean average score: 9.393


Absolute PID controller Error sum: 38310.63818365861
Absolute PID controller Force sum: 9393

2.6 MPC Policy¶
# Orginal code from http://www.philipzucker.com/model-predictive-control-of-cartpole-in-openai-gym-using-osqp/
from mpc import MPC # Author: Philip Zucker
# Resources on MPC:
# http://www.philipzucker.com/osqp-sparsegrad-fast-model-predictive-control-python-inverted-pendulum/
# https://github.com/philzook58/cart_pole # RL on a Real Cart Pole
# Define an MPC control Policy based on the sparsegrad and osqp solver packages
class Policy_MPC():
def __init__(self):
self.action = 0
start_theta = np.pi # -np.pi + 0.4 # + 0.1 # 2 * np.pi # np.pi+0.4
self.mpc = MPC(0.5, 0, start_theta, 0)
def act(self, state):
self.action = self.mpc.update(state[0] + 0.5, state[1], state[2] + np.pi, state[3])
if self.action < 0:
return 0
return 1
policy = Policy_MPC()
scores, trials_to_solve = run_cartPole(policy, n_episodes=1000, print_every=1, record_video=False)
print('** Mean average score:', np.mean(scores))
# plot_performance(scores)
# plot_trials_to_solve(trials_to_solve)
print(policy.mpc.calcQ())
/Users/Pierre/.virtualenvs/DeepQC/lib/python3.6/site-packages/osqp/interface.py:109: UserWarning: Converting sparse P to a CSC (compressed sparse column) matrix. (It may take a while...)
"(compressed sparse column) matrix. (It may take a while...)")
** Evaluating Policy_MPC **
Episode 1 Average Score: 200.00 Steps: 199
Episode 1 Average Score: 200.00 Steps: 199
** Environment solved in -99 episodes! Average Score: 200.00
** Mean average score: 200.0
[ -0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
-0.025 -0.025 -0.025 -0.025 -0.025
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
-3.14159265 -3.52627747 -3.91096228 -4.2956471 -4.68033191
-5.06501673 -5.44970154 -5.83438636 -6.21907117 -6.60375599
-6.9884408 -7.37312562 -7.75781043 -8.14249525 -8.52718006
-8.91186487 -9.29654969 -9.6812345 -10.06591932 -10.45060413
-10.83528895 -11.21997376 -11.60465858 -11.98934339 -12.37402821
-12.75871302 -13.14339784 -13.52808265 -13.91276747 -14.29745228
-14.6821371 -15.06682191 -15.45150672 -15.83619154 -16.22087635
-16.60556117 -16.99024598 -17.3749308 -17.75961561 -18.14430043
-18.52898524 -18.91367006 -19.29835487 -19.68303969 -20.0677245
-20.45240932 -20.83709413 -21.22177895 -21.60646376 -21.99114858
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0.
0. 0. 0. 0. 0. ]
3 - Reinforcement Learning¶
3.1 Random Search Policy¶
# Define a Random Search Policy
# Find a double PD controller (pos, vel) on both Angle and Translation by randomly trying values.
# from https://github.com/NHDaly/jupyter-binder/blob/master/OpenAI-gym-cartpole-random-guessing.ipynb
def random_range(a, b, shape):
return (b-a) * np.random.random(shape) + a
class Policy_RandomSearch():
def __init__(self):
self.best_parameters = None
self.best_reward = 0 # or -np.Inf is better?
self.current_reward = 0
self.rewards = []
self.parameters = '** Generate random parameters here **'
self.parameters_history = [self.parameters] # History of weights, for viz purpose
def act(self, state):
self.observation = state # This is the observed angle
action = 0 if np.matmul(self.parameters, self.observation) < 0 else 1
return action
def memorize(self, next_state, action, reward, done):
if reward == 1:
self.current_reward += 1
self.rewards.append(self.current_reward)
def update(self, state):
self.current_reward = 0
# We remember the best parameters if the environment was solved
# TODO: best_reward should be a moving average on some trials to avoid random lucky solution
if len(self.rewards) > 1 and self.rewards[-1] >= self.best_reward: # If we have some rewards
self.best_reward = self.rewards[-1]
self.best_parameters = self.parameters
# Get new random parameter values
self.parameters = '** Generate random parameters here **'
self.parameters_history.append(self.parameters)
policy = Policy_RandomSearch()
scores, trials_to_solve = run_cartPole(policy, n_episodes=1000, print_every=100, render_env=False, record_video=False)
print('** Best reward recorded:', policy.best_reward)
print('** Best parameters **')
print(' Cart Position coef:', policy.best_parameters[0])
print(' Cart Velocity coef:', policy.best_parameters[1])
print(' Pole Angle coef: ', policy.best_parameters[2])
print(' Pole Velocity coef:', policy.best_parameters[3])
print('** Mean average score:', np.mean(scores))
plot_performance(scores)
plot_trials_to_solve(trials_to_solve)
plot_weights_history(policy.parameters_history)
** Evaluating Policy_RandomSearch **
Episode 100 Average Score: 49.57 Steps: 139
Episode 200 Average Score: 57.20 Steps: 199
Episode 300 Average Score: 45.32 Steps: 29
Episode 400 Average Score: 48.37 Steps: 43
Episode 500 Average Score: 32.31 Steps: 111
Episode 600 Average Score: 49.27 Steps: 9
Episode 700 Average Score: 51.34 Steps: 37
Episode 800 Average Score: 48.24 Steps: 8
Episode 900 Average Score: 48.24 Steps: 17
Episode 1000 Average Score: 45.25 Steps: 8
** The environment has never been solved!
Mean scores on all runs was < 195.0
** Best reward recorded: 199
** Best parameters **
Cart Position coef: -0.925577927382397
Cart Velocity coef: 0.9867559873798102
Pole Angle coef: -0.4512634198247374
Pole Velocity coef: 0.9044972441434123
** Mean average score: 47.511



policy.parameters = policy.best_parameters
# Try the best parameters found:
scores, trials_to_solve = run_cartPole(policy, n_episodes=1, print_every=1, record_video=False)
** Evaluating Policy_RandomSearch **
Episode 1 Average Score: 200.00 Steps: 199
Episode 1 Average Score: 200.00 Steps: 199
** Environment solved in -99 episodes! Average Score: 200.00
3.2 Hill-climbing Policy¶
%%html
<img "Kevin Frans' CartPole hill climbing schema" src="cartpole-hill.jpg" width="600">

# Define a hill_climbing Policy
class Policy_Hill_Climbing():
def __init__(self, state_space_dim=4, action_space_dim=2):
self.rewards = []
self.best_R = -np.Inf
# Weights for a simple linear policy:
self.w = 1e-4 * '** Generate random Weights here **' # state_space_dim * action_space_dim
self.best_w = self.w # Initialize the best weights
self.w_history = [self.w] # History of weights, for viz purpose
self.noise_scale=1e-2 # Standard Deviation of the Additive Noise
self.gamma=1.0 # discount rate
def forward(self, state):
x = np.dot(state, self.w)
return np.exp(x) / sum(np.exp(x))
def act(self, state):
probs = self.forward(state)
# action = np.random.choice(2, p=probs) # Option 1: Stochastic Policy
action = np.argmax(probs) # Option 2: Deterministic Policy
return action
def memorize(self, next_state, action, reward, done):
self.rewards.append(reward)
def update(self, state):
discounts = [self.gamma**i for i in range(len(self.rewards)+1)]
self.R = sum([a*b for a,b in zip(discounts, self.rewards)])
if self.R >= self.best_R: # found better weights
self.best_R = self.R
self.best_w = self.w
self.noise_scale = max(1e-3, self.noise_scale / 2)
self.w += '** Add something the Weights here **' * np.random.rand(*self.w.shape)
else: # did not find better weights
self.noise_scale = min(2, self.noise_scale * 2)
self.w = self.best_w + '** Add something the the Best Weights here **' * np.random.rand(*self.w.shape)
self.w_history.append(self.w)
# Reset rewards memory?
self.rewards = []
policy = Policy_Hill_Climbing()
scores, trials_to_solve = run_cartPole(policy, print_every=100, render_env=False)
print('** Mean average score:', np.mean(scores))
plot_performance(scores)
plot_trials_to_solve(trials_to_solve)
plot_weights_history(policy.w_history)
** Evaluating Policy_Hill_Climbing **
Episode 100 Average Score: 89.97 Steps: 199
Episode 168 Average Score: 196.20 Steps: 199
** Environment solved in 68 episodes! Average Score: 196.20
** Mean average score: 134.50595238095238


# Replay with the last trained Policy
# import time
env = gym.make('CartPole-v0')
env = gym.wrappers.Monitor(env, "./gym-results", force=True) # video_callable=lambda episode_id: True
state = env.reset()
for t in range(200):
action = policy.act(state)
# env.render()
# time.sleep(0.04) # 25fps
state, reward, done, _ = env.step(action)
if done:
break
env.env.close() # This was a pain to found!
env.close() # TODO: Why both env.env.close & env.close?!
# https://stackoverflow.com/a/54149154
import io
import base64
from IPython.display import HTML
video = io.open('./gym-results/openaigym.video.%s.video000000.mp4' % env.file_infix, 'r+b').read()
encoded = base64.b64encode(video)
HTML(data='''
<video width="640" height="auto" alt="test" controls><source src="data:video/mp4;base64,{0}" type="video/mp4" /></video>'''
.format(encoded.decode('ascii')))
3.4 Policy Gradient¶
3.5 Q-Learning¶
Off-policy TD control. Finds the optimal greedy policy while following an epsilon-greedy policy #### Resources - Q-Learning on Wikipedia - Matthew Chan’s Cart-Pole Balancing with Q-Learning - Ferdinand Mütsch’s CartPole with QLearning - Denny Britz’s Q-Learning code

Q-Learning equation on Wikipedia
# Original code from https://ferdinand-muetsch.de/cartpole-with-qlearning-first-experiences-with-openai-gym.html
import math, random
# Ferdinand Mütsch ran a GridSearch on hyperparameters:
# Best hyperparameters: 'buckets': (1, 1, 6, 12), 'min_alpha': 0.1, 'min_epsilon': 0.1
# Define a Q-Learning Policy
class Policy_QLearning():
def __init__(self, buckets=(1, 1, 6, 12,), min_alpha=0.1, min_epsilon=0.1, gamma=1.0, ada_divisor=25, state_space_dim=4, action_space_dim=2):
self.buckets = buckets # down-scaling feature space to discrete range
self.min_alpha = min_alpha # Learning Rate
self.min_epsilon = min_epsilon # Exploration Rate: # to avoid local-minima, instead of the best action, chance ε of picking a random action
self.gamma = gamma # Discount Rate factor
self.ada_divisor = ada_divisor # only for development purposes
self.action_space_dim = action_space_dim
self.Q = np.zeros(self.buckets + (self.action_space_dim,))
self.rewards = [0] # Initialize to 0
self.action = 0 # Initialize to 0
def discretize(self, obs):
# Ferdinand choose to
upper_bounds = [env.observation_space.high[0], 0.5, env.observation_space.high[2], math.radians(50)]
lower_bounds = [env.observation_space.low[0], -0.5, env.observation_space.low[2], -math.radians(50)]
ratios = [(obs[i] + abs(lower_bounds[i])) / (upper_bounds[i] - lower_bounds[i]) for i in range(len(obs))]
new_obs = [int(round((self.buckets[i] - 1) * ratios[i])) for i in range(len(obs))]
new_obs = [min(self.buckets[i] - 1, max(0, new_obs[i])) for i in range(len(obs))]
return tuple(new_obs)
def act(self, state):
new_state = self.discretize(state)
self.update_q(self.current_state, self.action, self.rewards[-1], new_state, self.alpha)
self.current_state = new_state
if np.random.rand() <= self.epsilon:
self.action = random.randrange(self.action_space_dim)
return self.action
self.action = np.argmax(self.Q[self.current_state])
return self.action
def memorize(self, next_state, action, reward, done):
self.rewards.append(reward)
def update_q(self, state_old, action, reward, state_new, alpha):
self.Q[state_old][action] += self.alpha * '** Update the Q matrix here **'
def reset(self, state):
# Decrease alpha and epsilon while experimenting
t = len(self.rewards)
self.alpha = max(self.min_alpha, min(1.0, 1.0 - math.log10((t + 1) / self.ada_divisor)))
self.epsilon = max(self.min_epsilon, min(1, 1.0 - math.log10((t + 1) / self.ada_divisor)))
self.current_state = self.discretize(state)
policy = Policy_QLearning()
scores, trials_to_solve = run_cartPole(policy, n_episodes=1000, print_every=100, render_env=False)
print('** Mean average score:', np.mean(scores))
plot_performance(scores)
plot_trials_to_solve(trials_to_solve)
** Evaluating Policy_QLearning **
Episode 100 Average Score: 60.33 Steps: 15
Episode 200 Average Score: 128.62 Steps: 199
Episode 300 Average Score: 179.22 Steps: 199
Episode 400 Average Score: 192.17 Steps: 199
Episode 415 Average Score: 195.95 Steps: 199
** Environment solved in 315 episodes! Average Score: 195.95
** Mean average score: 142.25060240963856


The discretize function reduces the big continous observable space dimensions to (1 * 1 * 12 * 16) = 72 integers.
discretize_viz = []
for i in range(1000):
x = env.reset()
y = policy.discretize(x)
discretize_viz.append(np.array([x, y]))
discretize_viz = np.array(discretize_viz)
plt.subplots_adjust(bottom=0, left=.1, right=1.8, top=1.6, hspace=.3)
i = 0
for dim_to_viz in range (4):
plt.subplot(2, 2, i + 1)
plt.title('Discretized dimension %d' % i)
plt.xlabel('Continuous Input')
plt.ylabel('Discretized Output')
i += 1
plt.scatter(discretize_viz[:, 0, dim_to_viz], discretize_viz[:, 1, dim_to_viz])

3.6 Deep Q-Learning¶
How to do not have to code a dimension reduction function and work on continuous state input: - Learn a model of the monstruous Q-matrix with (Deep) Neural Networks, then infere.
Resources¶
- Adalberto Cq DQN code
- Keon Kim’s Deep Q-Learning
- Keon Kim’s Deep Q-Learning code
- Ferdinand Müetsch’s CartPole with a Deep Q Network
- Ferdinand Müetsch’s DQN code
- DeepMind’s Deep Q-Learning paper Playing Atari with Deep Reinforcement Learning, *Mnih & al., NIPS 2013*
import random
from keras.models import Sequential
from keras.layers import Dense
from keras.optimizers import Adam
# Define a Deep Q-Network Agent
class Policy_DQN():
def __init__(self, state_space_dim=4, action_space_dim=2):
self.action_space_dim = action_space_dim
self.gamma = 0.95 # 0.95 # Discount rate
self.epsilon = 1.0 # 0.2 1.0<->0.1 # This should be tuned carefuly
self.epsilon_min = 0.01 # 0.0001 0.001
self.epsilon_decay = 0.995 # 0.995
self.learning_rate = 0.01 # 0.0005<->0.001 # This should be tuned carefuly
self.learning_rate_decay = 0.01 # 0.01 Learning rate decay
self.batch_size = 64 # 32
self.episode = 0 # Episode counter
self.current_state = np.array(env.reset()).reshape(1, 4)
print('Deep Neural Networks to model the Q Table:')
self.model = self._build_model(state_space_dim, action_space_dim)
self.model.summary()
# self.memory = []
self.memory = deque(maxlen=100000) # We can limit the memory size
def _build_model(self, state_space_dim, action_space_dim):
# Neural Net for Deep-Q learning Model
model = Sequential()
model.add(Dense(24, input_dim=state_space_dim, activation='tanh')) # 24 16 # relu tanh
model.add(Dense(48, activation='tanh')) # 48 24 8 # relu tanh
model.add(Dense(action_space_dim, activation='linear')) # linear
model.compile(loss='mse',
optimizer=Adam(lr=self.learning_rate, decay=self.learning_rate_decay))
return model
def act(self, state):
epsilon = max(self.epsilon_min, min(self.epsilon, 1.0 - math.log10((self.episode + 1) * self.epsilon_decay)))
if np.random.random() <= epsilon: # epsilon-greedy action selection
# action = random.randrange(self.action_space_dim)
action = env.action_space.sample()
else:
act_values = self.model.predict(np.array(state).reshape(1, 4))
# action = np.argmax(act_values[0])
action = np.argmax(act_values)
return action
def memorize(self, next_state, action, reward, done):
# Memorize all observables and environment trial results
next_state = np.array(next_state).reshape(1, 4)
self.memory.append((self.current_state, action, reward, next_state, done))
self.current_state = next_state
def update(self, state):
self.episode += 1 # Increment trial counter
# Train the Q-Network
# if len(self.memory) > self.batch_size: # If there are enough trial in memory
# if len(self.memory) % 4: # Train only every 4th trial
# if len(self.memory) > 1000: # We can lazy start to acquire more data before learn on it
self.replay_to_train(self.batch_size)
def replay_to_train(self, batch_size):
state_batch, Q_batch = [], []
minibatch = random.sample(self.memory, min(len(self.memory), batch_size))
for state, action, reward, next_state, done in minibatch:
Q_target = self.model.predict(state) # Use the model to predict the target
if done : # Full reward because environment was solved
Q_target[0][action] = reward
else: # Discount the reward by gamma because environment was not solved
Q_target[0][action] = reward + self.gamma * np.max(self.model.predict(next_state)[0])
state_batch.append(state[0])
Q_batch.append(Q_target[0])
self.model.fit(np.array(state_batch), np.array(Q_batch), batch_size=len(state_batch), verbose=0)
if self.epsilon > self.epsilon_min:
self.epsilon *= self.epsilon_decay
policy = Policy_DQN()
# We increase max_t so we can memorize more trials at the beginning
scores, trials_to_solve = run_cartPole(policy, n_episodes=2000, max_t=5000, print_every=100, render_env=False)
print('** Mean average score:', np.mean(scores))
plot_performance(scores)
plot_trials_to_solve(trials_to_solve)
Deep Neural Networks to model the Q Table:
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
dense_30 (Dense) (None, 24) 120
_________________________________________________________________
dense_31 (Dense) (None, 48) 1200
_________________________________________________________________
dense_32 (Dense) (None, 2) 98
=================================================================
Total params: 1,418
Trainable params: 1,418
Non-trainable params: 0
_________________________________________________________________
** Evaluating Policy_DQN **
Episode 100 Average Score: 10.88 Steps: 9
Episode 200 Average Score: 9.86 Steps: 9
Episode 300 Average Score: 9.40 Steps: 10
Episode 400 Average Score: 11.37 Steps: 8
Episode 500 Average Score: 24.24 Steps: 15
Episode 600 Average Score: 41.80 Steps: 82
Episode 700 Average Score: 120.48 Steps: 199
Episode 800 Average Score: 161.75 Steps: 199
Episode 900 Average Score: 162.77 Steps: 199
Episode 1000 Average Score: 158.10 Steps: 199
Episode 1100 Average Score: 124.66 Steps: 138
Episode 1200 Average Score: 152.48 Steps: 162
Episode 1300 Average Score: 174.42 Steps: 124
Episode 1400 Average Score: 190.54 Steps: 199
Episode 1500 Average Score: 187.28 Steps: 199
Episode 1600 Average Score: 186.70 Steps: 199
Episode 1700 Average Score: 189.43 Steps: 199
Episode 1800 Average Score: 183.61 Steps: 199
Episode 1841 Average Score: 195.41 Steps: 199
** Environment solved in 1741 episodes! Average Score: 195.41
** Mean average score: 118.44378055404671


Going further with Deep Q-Learning¶
- Double DeepQ-Learning to stabilize convergence: one model predict the future state, one predict the Q-table
- Use LSTM networks as Long Term memories
- keras-rl library
Going further¶
- Neural Networks and Deep Learning book by Micheal Nielsen
- Imitation Learning: https://cdancette.fr/2018/04/09/self-driving-CNN/
- Denny Britz excellent repository
- Jonathan Hui’s Reinforcement Learning overview
- What we have not see:
- SARSA (Q-Learning generalized)
- Temporal Difference (TD) Learning (see Part II. 02_RL_2_CarRacing)
- Cross-Entropy Method (CEM)
- Actor-Critic, A3C
- Deep Deterministic Policy Gradient (DDPG), Double Gradient Descent
- Natural Policy Gradiant, TRPO, PPO, REINFORCE (Monte Carlo Policy Gradient)
- Monte Carlo Search, Monte Carlo Tree Search (MCTS)
- Model based: Policy Search with Gaussian Process, PILCO or Guided PS
- Imitation Learning